WEEK 8
Activity: LM35 Interfacing With Arduino...How it Work?
Today blog I will explain about the LM35 interfacing with the Arduino. Learning something new is quite interesting okay...When talking about LM35 that's means this component is related with the temperature sensor. So below is the LM35 picture. For your information, this is the 4th Experiment that I do for my FYP Project is Development of Home Automation System Using Android with Smartphones Application.

LM35 Temperature Sensor
LM35 SIMPLE INTRODUCTION
- Having an analog output voltage proportional to the temperature is the LM35.
- Output analog voltage can be converted to digital via the ADC
- No any external calibration circuitry and provide output voltage in Celsius.
- When temperature is increases, then the output voltage also increases and the sensitivity of LM35 is up to 10mV/degree Celsius.
- The temperature ranging from -55 to 150 Celsius with 3 terminal sensor is used.
- One of the advantages is the temperature output of LM35 is more precise than the thermistor output. As you can see the pin description at above.
PIN DESCRIPTION
- GND: Ground
- VCC: Supply Voltage from (3.3V - 30V)
- OUT: Gives analog output voltage to proportional to the temperature (in Celsius)
INTERFACING DIAGRAM

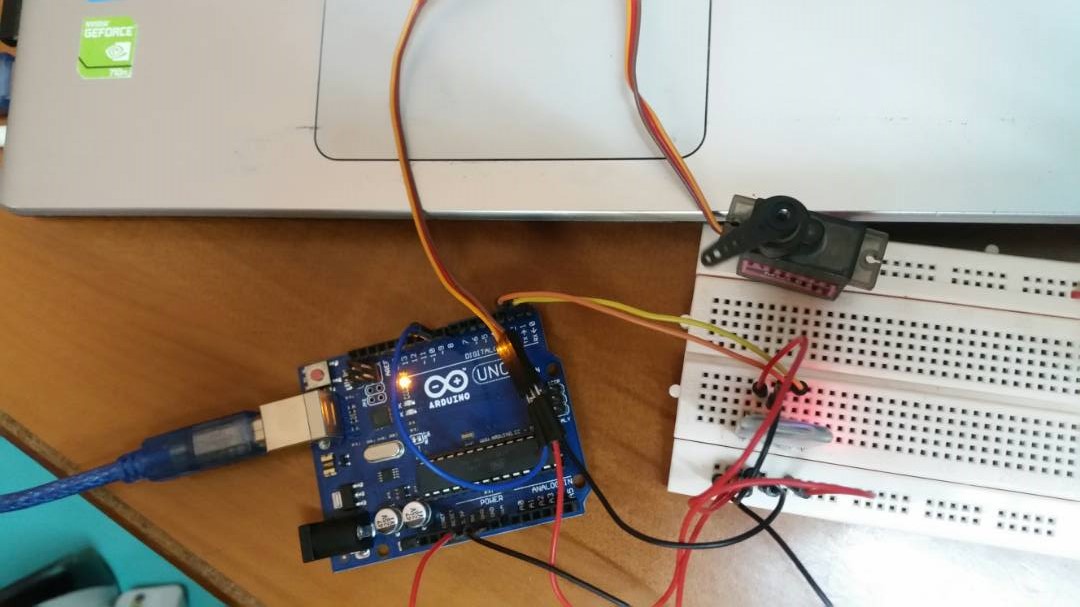
Interfacing LM35 with Arduino Nodemcu
After connect the power supply on Nodemcu, then upload the coding of LM35 and the serial monitor will displaying all the measuring og surrounding. Based on the above picture, the Arduino UNO has been replace to the Nodemcu which is change it to the small component and the interesting is this Nodemcu is completely with the Wi-Fi.

Coding From Temperature Measurement
Based on the picture coding above, you can see the arrow. Both arrow is the 'auth token' (can get from the email) and the 'ssid' and 'password'. Need to fill all of this instead of coding to run this experiment.

Result from Blynk Apps
Refer to the picture above, is the result from Android Application "BLYNK". As you can see the reading show is the ADC Value. Here the LM35 output is given to analog pin A0 of Nodemcu.

Coding LM35
Based on the Picture above, is the coding to get LM35 data via the blynk apps. For this case, I will prove the output on BLYNK apps is correct with this calculation.
CASE 1:
resolution = Vref / 1024
where;
Vref = 3.3V
= 3.3V / 1024
temperature = (analog voltage * resolution) * 100
where;
= (89 * 0.003222) * 100
= 0.2868 * 100
= 28.68 Celsius
Based on the calculation, the value in Celsius show is 28.68 and the serial monitor show the reading is 28 Celsius. meaning that, the value from serial monitor is more precise than the value of calculation.
UNTIL THEN...
THAT'S ALL FOR THIS WEEK..WAIT MY ANOTHER BLOG PROGRESS FOR MY FYP PROJECT. ASSALAMUALAIKUM...
☺ ☺ ☺ ☺ ☺